Transmissive Radar for Lifesaving and Security Applications at Disaster Sites
Research Background and Objectives
Autonomous mobile robots that operate in hazardous or harmful environments such as disaster sites and space environments are useful for a wide range of applications (rescue assistance, resource exploration, etc.) and are in great demand by society and industry. A TOF (Time Of Flight) camera, a typical three-dimensional distance sensor, uses infrared pulses to produce distance images at about 30 frames per second. However, TOF cameras have a high sensitivity to ambient light, and the distance error at a distance of 2-3 m can be as small as 10 cm. Furthermore, direct measurement of the target's moving velocity is difficult, making it difficult to achieve the highly accurate velocity vector estimation and trajectory prediction required to avoid collisions with obstacles. On the other hand, ultrasonic distance measurement is useful as a short-range image sensor because of its high resolution and low cost. However, it is difficult to use this sensor in disaster-stricken areas because of its high attenuation in the high-frequency range and the fact that its range accuracy is highly dependent on the environment, such as heat and atmospheric pressure.
Advantages of UWB Radar
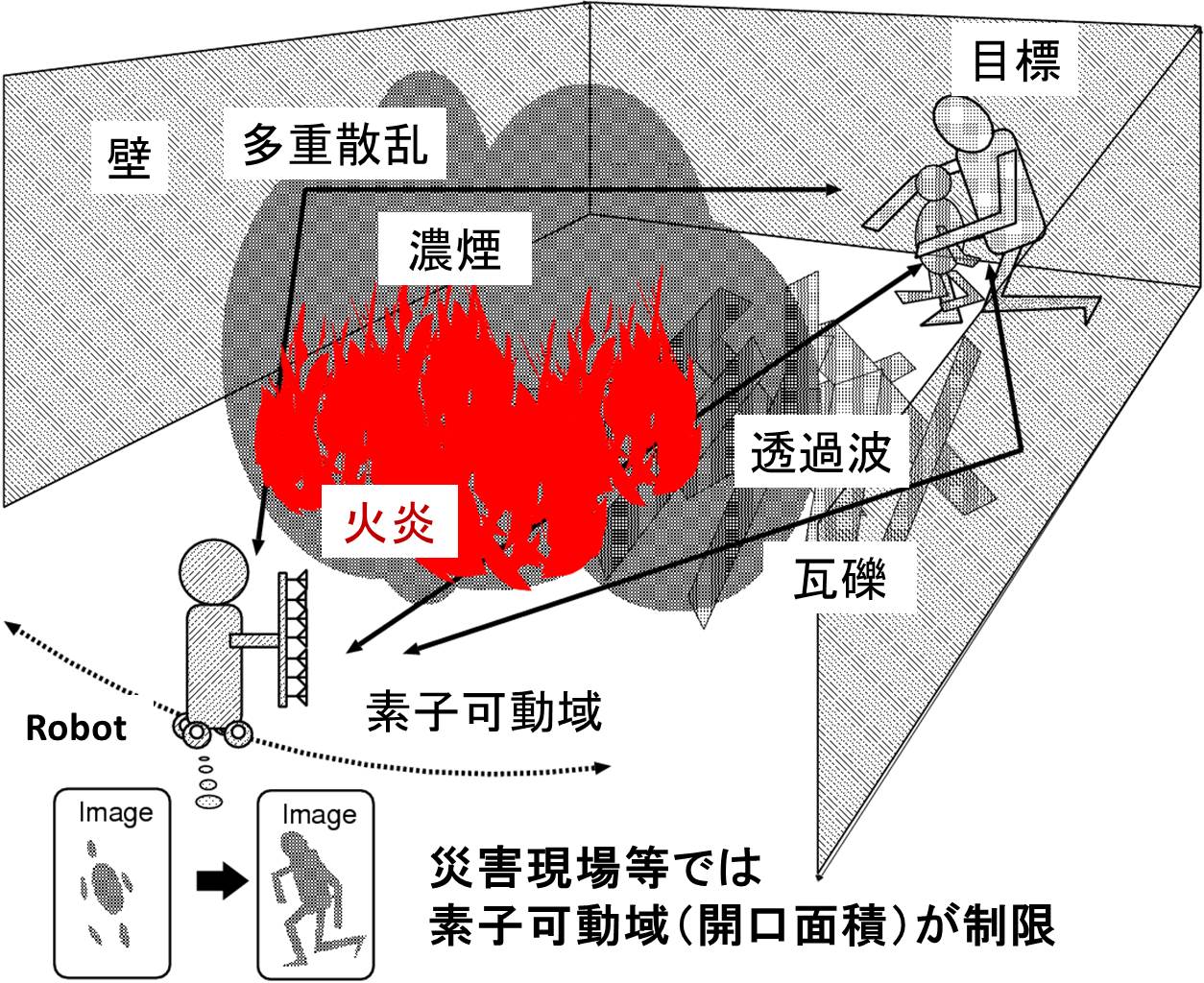
In contrast, image radar technology using UWB signals (signals with a frequency band of 500 MHz or higher: approved by the FCC in the United States and other countries since 2002) can be applied even in poor measurement environments such as dust, high gas concentration, strong backlighting, and high heat. (Figure 1). Furthermore, by utilizing the unique characteristics of radio waves such as "polarization," "dielectric transmission," and "scattering frequency characteristics," it is expected to create an innovative imaging technology that surpasses existing measurement performance. Especially, it is useful for three-dimensional image sensors for robotics, security, etc., and research on its application and practical use is rapidly developing in Europe and the United States. However, the field is still in its infancy, and no technology has been established that satisfies the performance requirements for the above applications in terms of processing speed, spatial resolution, and image reproduction range. In response to this, we have proposed several methods (RPM method: Range Points Migration, etc.) that achieve "ultra wavelength resolution," "real-time processing performance," and "image reproduction area expansion by multiple scattered waves.
These methods are based on an original imaging theory and have had a great impact on the field, especially in achieving [1/10 wavelength resolution] and [1/100 wavelength accuracy].
Fusion with Doppler velocity
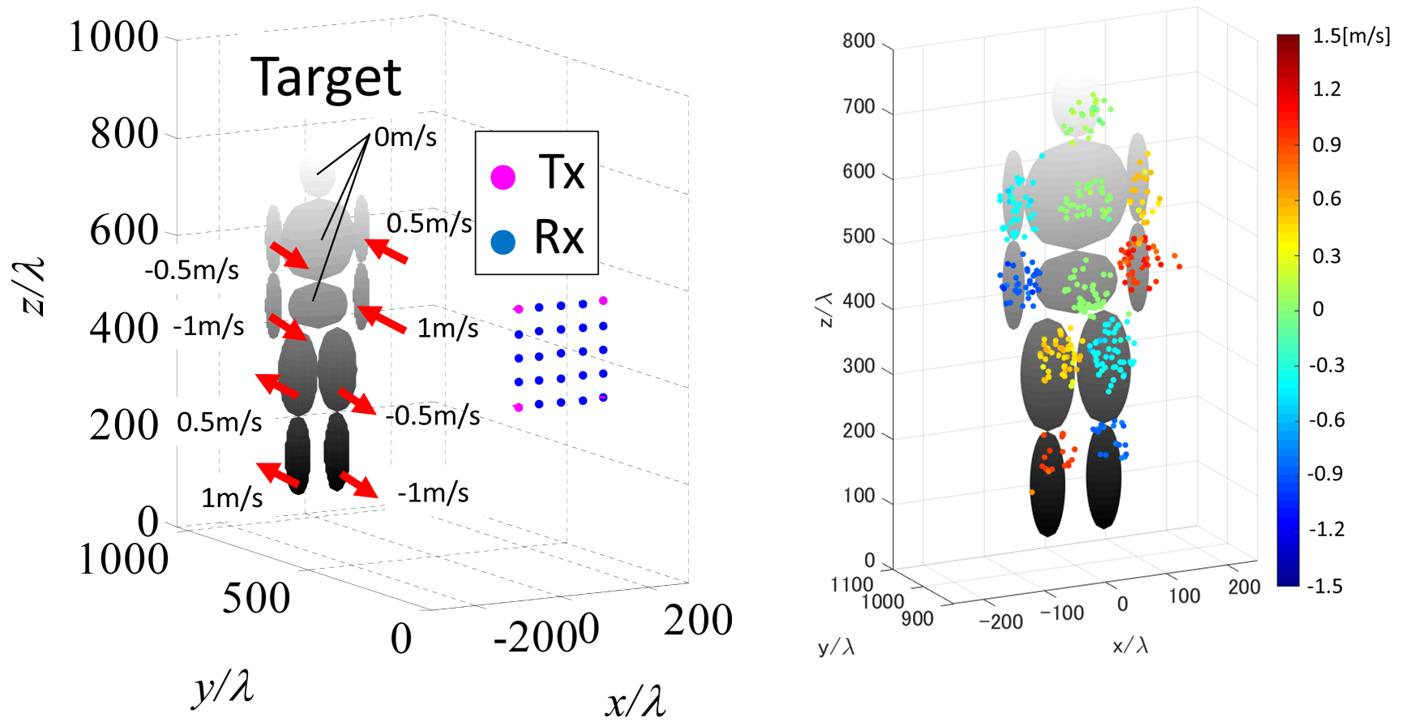
When the human body is in motion, each part of the body has a different velocity. By integrating this information with the estimated points of the RPM method, it is possible to add velocity information to the same image points. Such a process can be realized using Doppler radar, which extracts Doppler velocity. Figure 2 shows an image obtained by integrating the Doppler velocity and RPM methods, assuming the human body motion model shown on the left.Å@ It is expected that not only highly accurate estimation of each part of the human body, but also more accurate recognition and estimation of the human body will be possible by adding velocity information to the points. Based on these methods, we are studying a method to reveal the entire image of a target in a limited observation area and a three-dimensional imaging method using wall transparency and polarization, which cannot be achieved with conventional optical sensors.
Yuta Sasaki, Fang Shang, Shouhei Kidera, Tetsuo Kirimoto, Kenshi Saho and Toru Sato,
"
Three-dimensional Imaging Method Incorporating Range Points Migration and Doppler Velocity Estimation for UWB Millimeter-wave Radar
",
IEEE Geoscience and Remote Sensing Letters, vol. 14, no. 1, pp. 122-126, Jan., 2017.
S. Kidera, T. Sakamoto and T. Sato,
"Accurate UWB Radar 3-D Imaging Algorithm for Complex Boundary without Range Points Connections" IEEE Trans. Geoscience and Remote Sensing, vol.48, no. 4, pp.~1993--2004, Apr., 2010.
Autonomous mobile robots that operate in hazardous or harmful environments such as disaster sites and space environments are useful for a wide range of applications (rescue assistance, resource exploration, etc.) and are in great demand by society and industry. A TOF (Time Of Flight) camera, a typical three-dimensional distance sensor, uses infrared pulses to produce distance images at about 30 frames per second. However, TOF cameras have a high sensitivity to ambient light, and the distance error at a distance of 2-3 m can be as small as 10 cm. Furthermore, direct measurement of the target's moving velocity is difficult, making it difficult to achieve the highly accurate velocity vector estimation and trajectory prediction required to avoid collisions with obstacles. On the other hand, ultrasonic distance measurement is useful as a short-range image sensor because of its high resolution and low cost. However, it is difficult to use this sensor in disaster-stricken areas because of its high attenuation in the high-frequency range and the fact that its range accuracy is highly dependent on the environment, such as heat and atmospheric pressure.
Advantages of UWB Radar
In contrast, image radar technology using UWB signals (signals with a frequency band of 500 MHz or higher: approved by the FCC in the United States and other countries since 2002) can be applied even in poor measurement environments such as dust, high gas concentration, strong backlighting, and high heat. (Figure 1). Furthermore, by utilizing the unique characteristics of radio waves such as "polarization," "dielectric transmission," and "scattering frequency characteristics," it is expected to create an innovative imaging technology that surpasses existing measurement performance. Especially, it is useful for three-dimensional image sensors for robotics, security, etc., and research on its application and practical use is rapidly developing in Europe and the United States. However, the field is still in its infancy, and no technology has been established that satisfies the performance requirements for the above applications in terms of processing speed, spatial resolution, and image reproduction range. In response to this, we have proposed several methods (RPM method: Range Points Migration, etc.) that achieve "ultra wavelength resolution," "real-time processing performance," and "image reproduction area expansion by multiple scattered waves.
These methods are based on an original imaging theory and have had a great impact on the field, especially in achieving [1/10 wavelength resolution] and [1/100 wavelength accuracy].
Figure 1: UWB radar sensing for disaster relief robots
Fusion with Doppler velocity
When the human body is in motion, each part of the body has a different velocity. By integrating this information with the estimated points of the RPM method, it is possible to add velocity information to the same image points. Such a process can be realized using Doppler radar, which extracts Doppler velocity. Figure 2 shows an image obtained by integrating the Doppler velocity and RPM methods, assuming the human body motion model shown on the left.Å@ It is expected that not only highly accurate estimation of each part of the human body, but also more accurate recognition and estimation of the human body will be possible by adding velocity information to the points. Based on these methods, we are studying a method to reveal the entire image of a target in a limited observation area and a three-dimensional imaging method using wall transparency and polarization, which cannot be achieved with conventional optical sensors.
Figure 2: Observation model (left), example of imaging by integrating RPM method and Doppler velocity
References
"Accurate UWB Radar 3-D Imaging Algorithm for Complex Boundary without Range Points Connections" IEEE Trans. Geoscience and Remote Sensing, vol.48, no. 4, pp.~1993--2004, Apr., 2010.