災害現場での人命救助及びセキュリティ応用を想定した透視型レーダ
研究背景と研究目的
災害現場・宇宙環境等の人体にとって危険または有害な環境下で活動する自律移動型ロボットは, 幅広い用途(救助補助・資源探査等)に有用であり,多くの社会的・産業的需要があります. 代表的な三次元距離センサであるTOF (Time Of Flight)カメラは, 赤外線パルスを用いて毎秒30フレーム程度の距離画像化を実現します. しかし,同カメラは環境光に対する誤差感度が高く,また2~3m程度の計測距離での距離誤差は10cm程度 にまで劣化するという問題があります.更に目標移動速度に対する直接計測が難しく, 障害物の衝突回避等に必須となる高精度な速度ベクトル推定・軌道予測の実現が難しいという問題点もあります. 一方,超音波距離計測は分解能が高く,安価に実現できるため,近距離画像センサとして有用です. しかし,同センサは,高周波領域の減衰が大きいこと,距離精度が熱・気圧の環境に大きく依存すること等の問題点を抱え, 災害現場等での運用は難しいという面も持ちます.
UWBレーダの利点
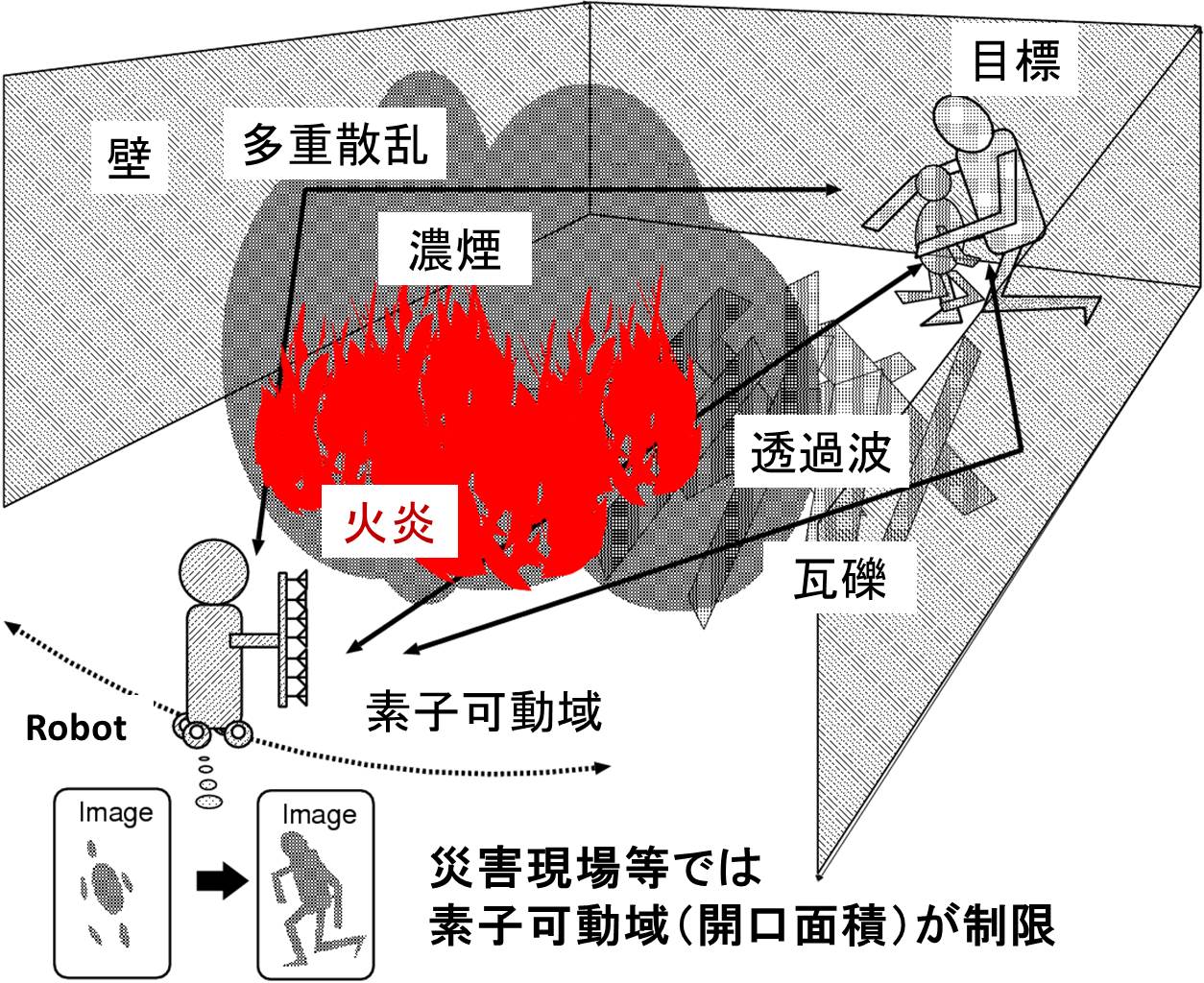
これに対し,UWB信号(500MHz以上の周波数帯域を有する信号:2002年以降,米国FCC等の各国で認可)を用いた画像レーダ技術は, 粉塵・高濃度ガス・強い逆光・高熱環境等の劣悪な測定環境下でも適用可能であり, その測距精度(数mm)は,遠方領域でも保持されます(図1). また,「偏波」・「誘電体透過性」・「散乱周波数特性」等の電波固有の特徴を複数利用することにより, 既存の計測性能を凌駕する革新的イメージング技術を創出することが期待されています. 特に,ロボット・セキュリティ等の三次元画像センサに有用であり, その応用・実用化研究は,欧米各国で急速に発展しています. しかし,同分野はまだ発展途上にあり,【処理速度】・【空間分解能】・【画像再現域】等の点で, 上記応用に供するに十分な性能を満たす技術は確立されていません.
これに対し,我々は【超波長分解能】・【実時間処理性能】・【多重散乱波による画像再現域拡大】を実現する 複数の手法(RPM法:Range Points Migration等)を提案してきています. これら手法は独創的な画像化理論に基づき,特に【1/10波長分解能】【1/100波長精度】を実現するものとして 当該分野に大きなインパクトを与えました.
ドップラ速度との融合
人体が運動するとき、各部位はそれぞれ異なる速度を有しています. この情報とRPM法の推定点を統合することで,同画像点に速度情報を付加させることができます. このような処理はドップラー速度を抽出するドップラーレーダにより実現することが出来ます. 図2は,左のような人体の動きモデルを仮定した場合に,ドップラー速度とRPM法を統合することで得られた画像が右図になります。 各部位を高精度に推定するだけでなく,その点に速度情報を付加することで, より高精度に人体の認識・推定が可能になると予測されます.
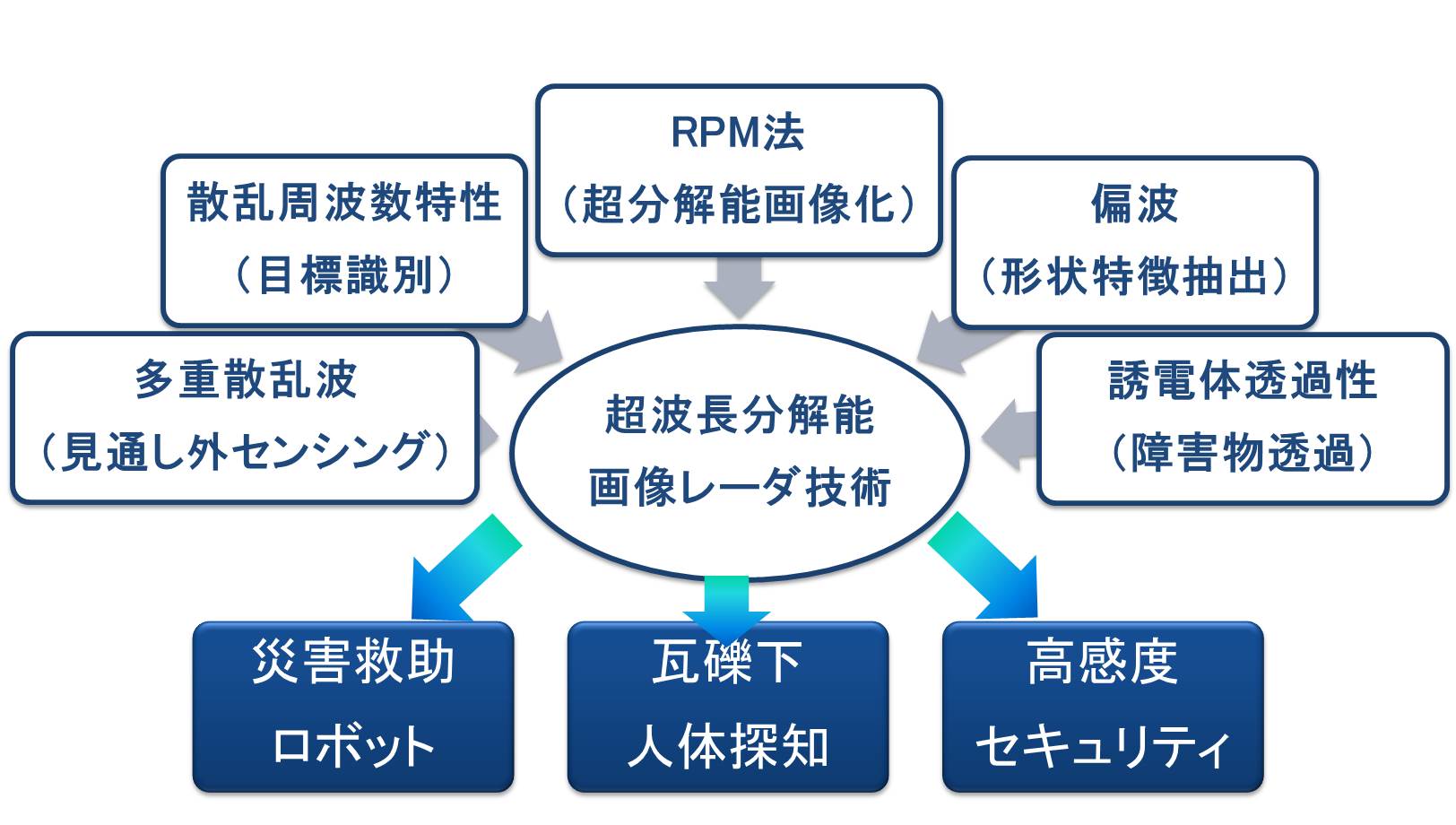
我々はこれらの手法を基盤として,限られた観測領域で目標の全体像を浮かび上がらせる手法や 壁透過性や偏波などを用いて,通常の光学センサでは達成できない3次元イメージング法を研究しており, これらは図3に示すような様々な応用に展開可能であると考えています. 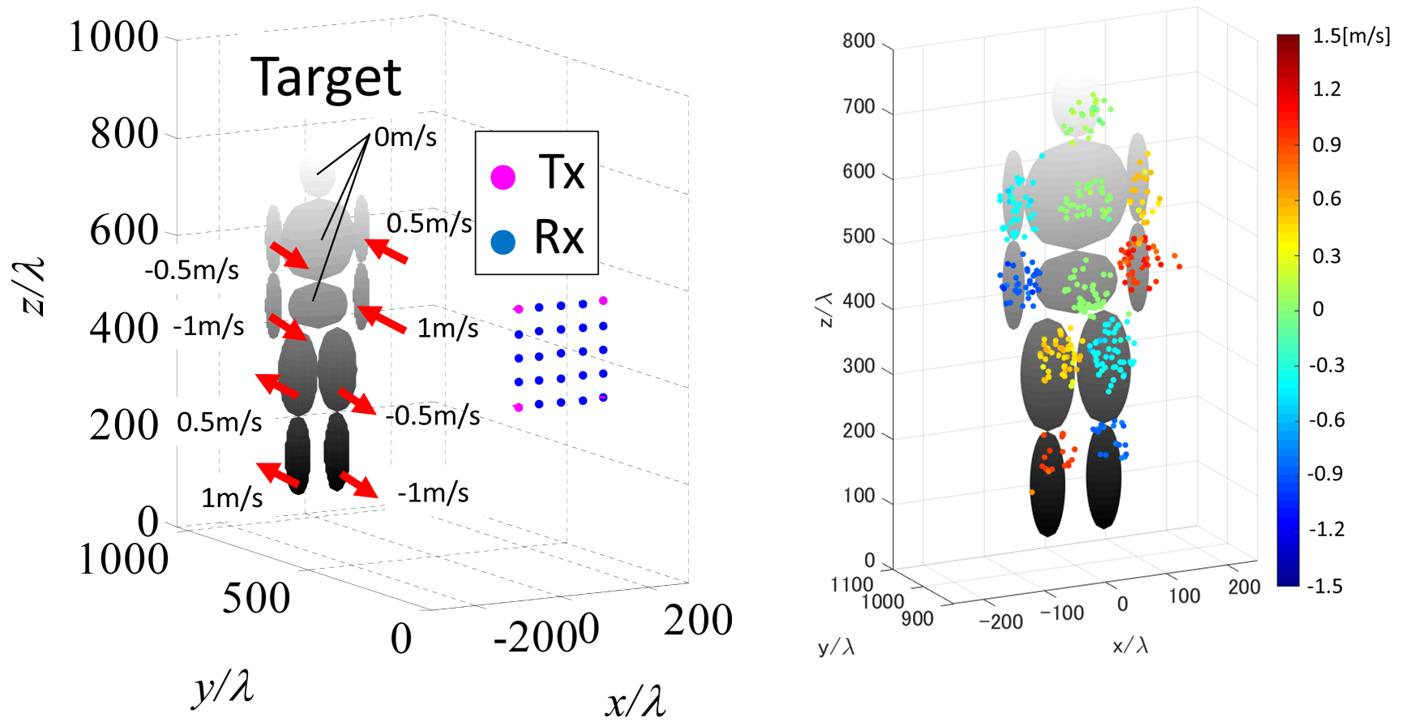
Yuta Sasaki, Fang Shang, Shouhei Kidera, Tetsuo Kirimoto, Kenshi Saho and Toru Sato,
"
Three-dimensional Imaging Method Incorporating Range Points Migration and Doppler Velocity Estimation for UWB Millimeter-wave Radar
",
IEEE Geoscience and Remote Sensing Letters, vol. 14, no. 1, pp. 122-126, Jan., 2017.
S. Kidera, T. Sakamoto and T. Sato,
"Accurate UWB Radar 3-D Imaging Algorithm for Complex Boundary without Range Points Connections" IEEE Trans. Geoscience and Remote Sensing, vol.48, no. 4, pp.~1993--2004, Apr., 2010.
災害現場・宇宙環境等の人体にとって危険または有害な環境下で活動する自律移動型ロボットは, 幅広い用途(救助補助・資源探査等)に有用であり,多くの社会的・産業的需要があります. 代表的な三次元距離センサであるTOF (Time Of Flight)カメラは, 赤外線パルスを用いて毎秒30フレーム程度の距離画像化を実現します. しかし,同カメラは環境光に対する誤差感度が高く,また2~3m程度の計測距離での距離誤差は10cm程度 にまで劣化するという問題があります.更に目標移動速度に対する直接計測が難しく, 障害物の衝突回避等に必須となる高精度な速度ベクトル推定・軌道予測の実現が難しいという問題点もあります. 一方,超音波距離計測は分解能が高く,安価に実現できるため,近距離画像センサとして有用です. しかし,同センサは,高周波領域の減衰が大きいこと,距離精度が熱・気圧の環境に大きく依存すること等の問題点を抱え, 災害現場等での運用は難しいという面も持ちます.
UWBレーダの利点
これに対し,UWB信号(500MHz以上の周波数帯域を有する信号:2002年以降,米国FCC等の各国で認可)を用いた画像レーダ技術は, 粉塵・高濃度ガス・強い逆光・高熱環境等の劣悪な測定環境下でも適用可能であり, その測距精度(数mm)は,遠方領域でも保持されます(図1). また,「偏波」・「誘電体透過性」・「散乱周波数特性」等の電波固有の特徴を複数利用することにより, 既存の計測性能を凌駕する革新的イメージング技術を創出することが期待されています. 特に,ロボット・セキュリティ等の三次元画像センサに有用であり, その応用・実用化研究は,欧米各国で急速に発展しています. しかし,同分野はまだ発展途上にあり,【処理速度】・【空間分解能】・【画像再現域】等の点で, 上記応用に供するに十分な性能を満たす技術は確立されていません.
これに対し,我々は【超波長分解能】・【実時間処理性能】・【多重散乱波による画像再現域拡大】を実現する 複数の手法(RPM法:Range Points Migration等)を提案してきています. これら手法は独創的な画像化理論に基づき,特に【1/10波長分解能】【1/100波長精度】を実現するものとして 当該分野に大きなインパクトを与えました.
図1:災害救助ロボットにおけるUWBレーダセンシング
ドップラ速度との融合
人体が運動するとき、各部位はそれぞれ異なる速度を有しています. この情報とRPM法の推定点を統合することで,同画像点に速度情報を付加させることができます. このような処理はドップラー速度を抽出するドップラーレーダにより実現することが出来ます. 図2は,左のような人体の動きモデルを仮定した場合に,ドップラー速度とRPM法を統合することで得られた画像が右図になります。 各部位を高精度に推定するだけでなく,その点に速度情報を付加することで, より高精度に人体の認識・推定が可能になると予測されます.
我々はこれらの手法を基盤として,限られた観測領域で目標の全体像を浮かび上がらせる手法や 壁透過性や偏波などを用いて,通常の光学センサでは達成できない3次元イメージング法を研究しており, これらは図3に示すような様々な応用に展開可能であると考えています.
図2:観測モデル(左),RPM法とドップラー速度を統合した画像化例
図3:本研究の応用展開
参考文献
"Accurate UWB Radar 3-D Imaging Algorithm for Complex Boundary without Range Points Connections" IEEE Trans. Geoscience and Remote Sensing, vol.48, no. 4, pp.~1993--2004, Apr., 2010.